5 апреля 2011
Робототехника
Три человека и их клоны-роботы впервые встретились в Японии
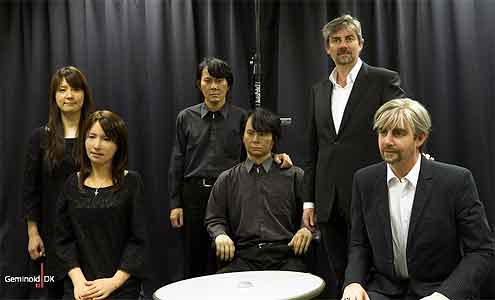
Настоящие люди стоят за спинами своих двойников. На создание одного андроида уходит до полугода, а цена робота достигает $200 тысяч. (фото Geminoid-DK).
30 марта состоялась встреча, которую лет 10 назад даже представить себе было невозможно. В одном помещении собрались три андроида и три человека, точными копиями которых эти роботы являются. Странная «семья» встретилась впервые и, видимо, в единственный раз. <...>
Читать полностью: Константин Болотов, Мембрана
---------------------------------------------------------------------------------------------
26 февраля 2011
1 января 2011
Робототехника
Фантастически впечатляющее видео о том, как робот за 15 секунд собирает кубик Рубика
(источник Lenta.ru)
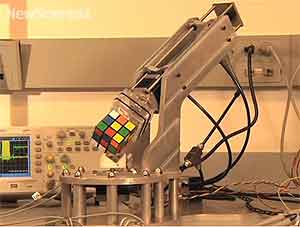 |
Кубик Рубика в этом году вероятно не находится в Рождественском списке у большинства людей, но он все еще вдохновляет инженеров создавать новые способы его сборки.
Захар Грэди (Zachary Grady) и Джо Райдгевэй (Joe Ridgeway), студенты из Университета Роуэна (Rowan University) в Нью-Джерси, построили с "нуля" автоматизированную руку и создали программное обеспечение, которое может собрать куб всего через 15 секунд.
Система использует камеру, чтобы захватить кадры, как кубик перемешивается (скремблируется) и посылает затем эти изображения в компьютер. Компьютер сравнивает образец на каждом снимке, затем, используя алгоритмы, собирает кубик. Найденное им решение переводится к пневматике руки и двигателям.
Джо Райдгевэй был вдохновлен собственной экспертизой — он может последовательно собирать кубик приблизительно через 45 секунд.
"Мы знали, что устройство было способно к выполнению этих движений", говорит он. Команда проектировала руку так, чтобы кубик был расположен в одном угле, позволяя руке [робота] быстро вращаться, без необходимости повторно захватывать кубик после каждого движения.
Посмотреть видео — можно здесь
---------------------------------------------------------------------------------------------
31 октября 2010
Нанотехнологии. Робототехника. Физика
Электронная кожа впервые ощутила прикосновения бабочки
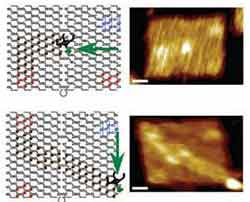
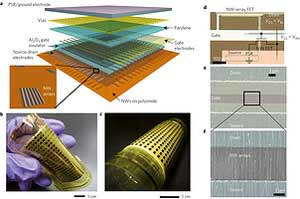 Решётка из тончайших полупроводниковых нитей, совмещённая с электродами и меняющей в ответ на давление проводимость резиной типа PSR (вверху) превращена калифорнийскими умельцами в "лоскут кожи" (внизу) (иллюстрации Kuniharu Takei et al./Nature Materials).
|

Уже немало копий сломано вокруг проблемы создания робототехнического аналога самого крупного органа человека. Главный вопрос – как воспроизвести невероятную чувствительность кожного покрова, который может ощутить дуновение ветерка от пролетевшего насекомого? Недавно две исследовательские группы из Калифорнии одновременно объявили о своих впечатляющих ответах.
Первая команда, из Калифорнийского университета в Беркли, выбрала в качестве ключевого элемента для своей искусственной кожи нанопроводки. Как сообщают учёные в пресс-релизе, они вырастили крошечные германиевые и кремниевые нити на специальном барабане, а затем прокатили этим валиком по подложке – клейкой полиимидной плёнке.
В итоге учёные получили эластичный материал, в структуру которого были включены нанопроводки, играющие роль транзисторов.
Поверх них исследователи нанесли изолирующий слой с периодическим рисунком из тонких отверстий, а ещё выше – чувствительную к прикосновению резину (PSR).
Между резиной и нанопроводками при помощи фотолитографии навели проводящие мостики (для этого и понадобились отверстия в слое изолятора) и, наконец, сдобрили бутерброд тонкой алюминиевой плёнкой – финальным электродом. (Подробности авторы системы представили в статье в Nature Materials).
Такой эластичный набор способен определять и точно локализовать участки, к которым прикладывается давление. Имя эта кожа получила банальное и предсказуемое — e-skin
Новая технология позволяет использовать в качестве подложки множество материалов, от пластика до резины, а также включать в её состав молекулы различных веществ, например, антибиотиков (что может оказаться весьма важным).
На опытном куске e-skin размером 7 х 7 сантиметров уместилась матрица 19 х 18 пикселей. В каждом из которых содержались сотни наноштырей. Такая система оказалась способна регистрировать давление от 0 до 15 килопаскалей. Примерно такие уровни нагрузки испытывает человеческая кожа при печатании на клавиатуре или удерживании на весу небольшого объекта.
|
|
")
Учёные указывают на вполне определённое преимущество своей разработки перед аналогами. Большинство проектов такого рода полагается на гибкие органические материалы, которым для работы требуется высокое напряжение.
Синтетическая кожа из Беркли — первая, изготовленная на основе монокристаллических неорганических полупроводников. Она функционирует при напряжении всего в 5 вольт. Но что ещё интереснее — опыт показал, что e-skin выдерживает до 2000 изгибаний с радиусом 2,5 миллиметра без потери чувствительности.
В качестве очевидной области применения в будущем такой кожи можно предположить чувствительные манипуляторы, способные оперировать хрупкими предметами.
Сверхаккуратную кибернетическую руку можно дополнительно оснастить датчиками тепла, радиоактивности, химических веществ, покрыть тонким слоем лекарств и использовать на "пальцах" роботов-хирургов или спасателей.
В последнем случае (при работе роботов с людьми) очень важным с точки зрения безопасности окажется тот факт, что электронная кожа из Беркли, как и человеческая, ощущает прикосновение почти мгновенно (в течение миллисекунд). В теории она может полностью покрывать манипулятор робота или даже всю машину.
") Вверху: профессор Чжэнань Бао (Zhenan Bao) – лидер стэнфордского проекта. Внизу: такая простая полимерная плёнка с алюминиевыми проводниками послужила отправной точкой в построении новой кожи (фото L.A. Cicero/Stanford University, Stefan C. B. Mannsfeld et al./Nature Materials).
|
Вторая разработка, родом из Стэнфордского университета, использует другой подход. Как сообщают учёные в пресс-релизе, они поместили между двумя электродами слой высокоэластичной формованной резины.
Такая плёнка накапливает электрические заряды подобно конденсатору. Давление сжимает резину – а это, в свою очередь, изменяет число электрических зарядов, которые способен хранить сандвич, что и определяет электроника благодаря набору электродов.
Описанный процесс позволяет обнаружить легчайшее прикосновение, что учёные доказали на опыте. Они использовали в качестве "тестера" мух.
В ходе эксперимента квадратная матрица со стороной в семь сантиметров и в миллиметр толщиной чувствовала посадку насекомых, весящих всего 20 миллиграммов, и реагировала на их касания с высокой скоростью.
Под микроскопом матрица похожа на поле, усеянное остроконечными пирамидками. В таком материале пирамидок этих может быть от сотен тысяч до 25 миллионов на квадратный сантиметр, в зависимости от требуемого пространственного разрешения.
Такой приём (вместо применения сплошного слоя резины) был необходим, поскольку монолитный материал, как выяснилось, терял свои свойства при сдавливании – точность регистрации зарядов падала. А свободное пространство вокруг микроскопических пирамид позволяет им легко деформироваться и восстанавливать исходную форму после снятия нагрузки.
Гибкость и прочность стэнфордской электронной кожи оказались очень высоки. Её нельзя растягивать, но вполне можно сгибать, обернув ею, например, руку робота.
Авторы электронной кожи из Стэнфорда, чья статья также вышла в Nature Materials, отмечают, что достоинства их технологии — дешевизна и широкий диапазон давлений, который способен измерять подобный бутерброд.
А потому в качестве сфер приложения своей разработки учёные видят опять же хирургических роботов. Но не только. Искусственная кожа могла бы стать основой электронных бинтов, — рассуждают американские исследователи, — способных подавать сигнал при слишком слабом или опасно сильном затягивании. А ещё подобные сенсоры могли бы точно фиксировать степень сжатия руками рулевого колеса, вовремя предупреждая водителя, что он засыпает.
Обе команды утверждают, что ещё продолжат развивать данное направление экспериментов. Так что роботы будущего, по всей видимости, всё же получат кожу, приближённую по возможностям к человеческой. И пусть внешне она будет заметно отличаться от нашей – её чувствительность придаст новый смысл понятию робот-андроид.
источник: Мембрана (01.10. 2010)
--------------------------------------------------------------------------------------------
14 мая 2010
Робототехника. Молекулярная биология. Нанотехнологии. Биофизика
Ученые создали нанороботов из ДНК
 Модель передвижений робота-"паука"
|
Сразу два коллектива исследователей разработали нанороботов, в основе которых лежит ДНК. Статьи ученых опубликованы в журнале Nature. Оба робота способны самостоятельно передвигаться и кратко описаны на портале Physics World.
[величина роботов всего примерно 4 нанометра в диаметре].
Первая группа ученых создала робота, который передвигается способом, напоминающим перемещения паука, и обладает высокой степенью автономности. В качестве ног этого робота выступают ферменты, "разрезающие" молекулы ДНК. Сами ферменты также представляют собой фрагменты ДНК. Таких ног у робота четыре, но во время движения он пользуется только тремя из них.
"Паук" перемещается по особому "полю" на котором расположены нити ДНК, способные образовывать с ногами робота прочное соединение (говорят, что такие нити ДНК комплементарны друг другу). После того как нога соединяется с нитями ДНК "поля", робот разрезает эту нить, и соединение становится менее прочным. Освободившаяся нога оказывается в состоянии готовности образовывать связи с новыми нитями. Повторяя эти операции, "паук" постепенно движется по "полю", оставляя за собой "скошенные" нити. В своих экспериментах ученые заставили робота пройти около 100 нанометров (по человеческим меркам это около 50 шагов).
Второй робот отличается меньшей самостоятельностью, но зато способен собирать и переносить грузы. У него тоже четыре ноги, однако они не обладают ферментативной активностью. В "основном состоянии" робот бездвижен благодаря так называемым якорным нитям, которые связывают ноги робота с нитями ДНК "поля". Для того чтобы робот начал двигаться, в среду, где он находится, нужно добавить одиночные нити ДНК определенной последовательности - топливные нити. При появлении топливных нитей ноги робота отсоединяются от нитей ДНК "поля" и соединяются с ними. Таким образом, ученые контролируют перемещение робота, добавляя в среду тот или иной тип нитей. Грузы присоединялись к роботу похожим образом - при помощи связанных с ними нитей ДНК.
В будущем авторы обеих работ намерены усовершенствовать своих роботов, чтобы добиться большей автономности и эффективности перемещений. Тем не менее, пока созданные людьми наномашины намного уступают своим природным аналогам, которые работают в каждой живой клетке.
Специалисты отмечают, что это важное открытие на пути к созданию автономных сборочных производств в наномасштабе. Кроме того, в будущем станет возможным создание молекулярных роботов, которые смогут работать в человеческом организме. Например, для доставки лекарства в отдельные клетки или "мелкого ремонта" в организме. Впрочем такие достижения, говорят ученые, станут возможны только лет через 100.
Источники: lenta.ru, vesti.kz, roboting.ru (здесь статья из раздела Будущее → Прогнозы: "Медицинский наноробот общего применения"
---------------------------------------------------------------------------------------------
18 апреля 2010
Космические исследования
В состав экипажа последней миссии шаттла включили робота

В состав экипажа шаттла "Дискавери", который отправится к МКС в сентябре 2010 года, впервые войдет робот.
Безногий андроид по имени Робонавт Второй (Robonaut II) будет жить вместе с астронавтами на станции и выполнять мелкие операции по хозяйству, а его потомки в перспективе смогут вместо людей выходить в открытый космос.
Что это — начало революции или просто курьезный эпизод в истории освоения космического пространства?
"На орбите без роботов не обойтись. Они выполняют рутинные работы за бортом, фотографируют Землю, убирают станцию. Кроме того, с ними хорошо играть в шахматы и морской бой..."
Примерно так будут начинаться научно-популярные статьи о роботах лет через двадцать. С позиций сегодняшнего дня можно спокойно делать столь смелые предположения и не опасаться попасть впросак (ну, может, промахнуться на несколько лет).
На самом деле по-настоящему революционного события сегодня не произошло.
Оно было всего лишь анонсировано, но серьезных причин сомневаться, что обещания Американского космического агентства (NASA) и компании General Motors (GM) не будут реализованы, пока нет. Разве что разразится новый финансовый кризис и практически завершенные разработки придется заморозить.
NASA и GM объявили, что во время последней миссии шаттла, которая запланирована на сентябрь 2010 года, на орбиту будет доставлен очень необычный член экипажа — робот. Робота зовут Робонавт Второй (Robotonaut II), и он очень похож на человека — по крайней мере, до пояса.
У Робонавта есть туловище, руки и голова в красивом шлеме. Вместо ног ученые приделали роботу, а точнее андроиду, специальную платформу, относительно которой он может вращаться на 360 градусов.
<...>
Читать дальше: Ирина Якутенко "Эпоха электрических овец" lenta.ru
---------------------------------------------------------------------------------------------
27 августа 2009
Робототехника
Новый робот-медвежонок носит людей на руках
 Японцы остановились на "благоприятном имидже плюшевого медвежонка", посчитав, что человекоподобный робот будет только пугать пациентов (фото RIKEN, Tokai Rubber Industries) |
Японский институт физических и химических исследований (BMC RIKEN) и компания Tokai Rubber Industries (TRI) вчера [26.08.09] представили "медвежеподобного" робота, предназначенного для оказания помощи медсёстрам в больницах. Новая машина буквально носит пациентов на руках.
RIBA (Robot for Interactive Body Assistance) — это усовершенствованная версия андроида RI-MAN.
<...> По сравнению с предшественником RIBA серьёзно продвинулся вперёд.
Как и RI-MAN, новичок способен аккуратно поднимать человека с кровати или инвалидного кресла, переносить его на руках, например в туалет, а потом доставлять обратно и так же бережно укладывать в постель или усаживать в коляску. Но если RI-MAN носил лишь зафиксированных в определённом положении кукол весом 18,5 кг, RIBA уже транспортирует живых людей массой до 61 кило.
Рост "медведя" 140 сантиметров (RI-MAN — 158 см), и весит он вместе с аккумуляторами 180 килограммов (предшественник — 100 кг). RIBA распознаёт лица и голоса, выполняет голосовые команды, ориентируется по собранным видео- и аудиоданным, которые обрабатывает в 15 быстрее, чем RI-MAN, и "гибко" реагирует на малейшие изменения в окружающей среде.
Руки нового робота имеют семь степеней свободы, голова — одну (позже будет три), в талии две степени. Корпус покрыт разработанным TRI новым мягким материалом наподобие полиуретановой пены. Двигатели работают довольно тихо (53,4 дБ), а всенаправленные колёса позволяет машине маневрировать в ограниченном пространстве. <...>
Подробнее... Мембрана
Читайте так же об инвалидном электрокаре, который поднимает больных с постели. И это чудо техники изготовлено недавно японскими умельцами.
---------------------------------------------------------------------------------------------
27 августа 2009
Робототехника
Европейцы строят робота с человеческой анатомией
|

Как и полагается скелету, ECCERobot выглядит немного пугающе: кости, сделанные вручную из гранулированного полимера, провода, верёвки, моторчики — маловероятно, что создатели когда-нибудь закроют это искусственной кожей. Напротив, анатомия должна быть всегда на виду (фото ECCERobot).
Большинство создателей андроидов обычно копируют лишь внешний вид человека, не заботясь о воспроизведении анатомии. А консорциум европейских разработчиков провозгласил о появлении нового вида робота: он наделён костями, суставами, мышцами и сухожилиями.
Андроид получил практически непереводимую характеристику – Anthropomimetic Robot. По идее, обладая анатомией человека, он сможет взаимодействовать с окружающим миром, как человек. Впрочем, разработчики отдают себе отчёт, что, просто "подделав" скелет и мускулатуру, 100-процентного успеха не добьёшься, но надеются заставить машину вести себя "более по-человечески".
Рассчитанный на три года проект ECCERobot стартовал в этом месяце. Приставка ECCE тут аббревиатура, и название расшифровывается как "Embodied Cognition in a Compliantly Engineered Robot" – познание, воплощённое в соответствующим образом спроектированном роботе. <...>
Подробнее... Мембрана
---------------------------------------------------------------------------------------------
22 мая 2009
Робототехника
Новый андроид показывает эмоции всем телом
 Что означает KOBIAN, остаётся только догадываться. Имя предшественника WABIAN расшифровывалось как WAseda BIpedal humANoid – двуногий гуманоид из университета Васеда (фото с сайта robot.watch.impress.co.jp). |
Эмоционального робота по имени KOBIAN представили в Японии учёные из лаборатории профессора Ацуо Таканиси (Takanishi Laboratory), исследовательской организации NEDO и итальяно-японского проекта RoboCasa.
KOBIAN является комбинацией двух других роботов: основная технологическая конструкция досталась ему от андроида WABIAN-2R, разработка которого идёт с 2002 года, а "эмоциональная" – от WE-4R, машины тоже далеко не новой.
Своё настроение и состояние (восторг, удивление, грусть, неприязнь и так далее – всего семь) робот демонстрирует, используя мимику, жесты и, можно сказать, позёрство. Разработчики называют это "взаимодействие с людьми через язык тела".
Подробнее... Мембрана
---------------------------------------------------------------------------------------------
9 апреля 2009
Робототехника. Медицина
Робот-хирург da Vinci обзавёлся зрением высокого разрешения
 Многорукий da Vinci позволяет оперировать с большой точностью, а значит, и с минимальным вмешательством в организм пациента. В результате восстановление после операции происходит быстрее, чем обычно (фото 2009 Intuitive Surgical)
|
Робот, который на данный момент "обитает" в нескольких сотнях клиник по всему миру [в том числе и в России], не является полностью автономным. Им управляет настоящий хирург. (Отметим, что компания-производитель Intutive Surgical не акцентирует своё внимание на удалённом управлении роботом.) Однако весьма внушительные характеристики аппарата позволяют доктору делать свою работу на высшем уровне.
Мы уже рассказывали о том, что "да Винчи" совершенствуется с 80-х годов прошлого века. Несложно догадаться, что такое имя ему дали в честь Леонардо да Винчи, так как в компании считают, что именно он создал первого робота (кроме того, гений описывал свои изобретения с анатомической точностью).
Несколько лет назад создатели робота-хирурга показали, что с его помощью можно проводить операции даже на бьющемся сердце. А одним из наиболее важных достижений da Vinci считается операция, которую провели новорождённой девочке.
Теперь же робота оснастили самыми продвинутыми "глазами" в мире (о чём свидетельствует пресс-релиз компании). Трёхмерное зрение было у него и раньше, а вот высокой чёткости добились только сейчас.
Новая версия позволяет следить за операцией сразу двум хирургам. Один из них может как ассистировать, так и учиться мастерству у старших коллег. На рабочем дисплее может быть отображена не только картинка с камер, но и два дополнительных параметра, например данные ультразвука и ЭКГ.
Кроме того, da Vinci стал более эргономичным, что облегчит врачам проведение более долгих и сложных операций. Также агрегат обладает кучей дополнительных улучшений, назначение которых будет понятно лишь специалисту (полный список здесь).
Подробности + фото и видео на Мембране
---------------------------------------------------------------------------------------------
16 марта 2009
Робототехника
Новый робот-женщина усердно уподобляется человеку
 "Почти человеческая" внешность робота удалась, пожалуй, как никогда. При таком росте – это существенный шаг вперёд, хотя разработчики по-прежнему считают его одним из первых (фото AP/Koji Sasahara). |
Андроид, созданный в Японском национальном институте наук и технологий (AIST), сегодня был представлен разработчиками как воплощение среднестатистической молодой женщины 19-29 лет. "Его формы, походка и поведение очень близки к человеческим", – говорят японцы.
...Рост робота составляет 158 см, а вес вместе с батареями – 43 кило. Что касается степеней свободы, их 42, к примеру, в области бёдер и шеи их по три, а в лице – аж восемь, они дают возможность выражать эмоции.
Всего заявлено порядка 30 электромоторов, функции распознавания речи, разговора и, возможно, другие способы взаимодействия с человеком.
Читать дальше и смотреть на Мембране
---------------------------------------------------------------------------------------------
16 ноября 2007
Робототехника и этология
Тараканы приняли роботов в свой коллектив с правом
решающего голоса
Ученые из Швейцарии, Бельгии и Франции изготовили маленьких
роботов-тараканов, способных «общаться» с живыми тараканами и
влиять на их поведение. Роботы пахнут по-тараканьи и адекватно
реагируют на поведение своих живых товарищей. Если
запрограммировать роботов на выбор худшего из двух
укрытий, то группа, состоящая из 12 тараканов и 4 роботов,
в итоге может вся целиком оказаться в плохом укрытии, хотя
без роботов тараканы почти всегда выбирают хорошее.
[Этология — наука о биологических основах поведения животных, занимающаяся главным образом генетически обусловленными (наследственными) компонентами поведения и эволюцией поведения (примечание АК)]
подробности... (Элементы)
---------------------------------------------------------------------------------------------
3 мая 2007
Робототехника
Учёные изготовили искусственные
сопли для роботов
Искусственные сопли — такую, на первый взгляд, бесполезную
субстанцию синтезировали учёные из лаборатории исследований сенсоров
(Sensors Research Laboratory — SRL)
при университете Уорика (University of Warwick) (Великобритания) и из
университета Лейстера(Leicester
University) (Великобритания). По утверждению профессора Джулиана Гарднера (Julian
W. Gardner), руководившего ходом разработки, она просто бесценна
— для искусственных же носов.
Синтетические сопли представляют собой смесь полимеров, которая
имитирует действие выделений слизистой оболочки носа. Использование
этих веществ должно заметно улучшить работу датчиков, улавливающих
молекулы, находящиеся в воздухе.
Чтобы проиллюстрировать необходимость такого улучшения, исследователи говорят, что человеческий нос имеет порядка ста миллионов рецепторов, посредством которых происходит идентификация молекул в воздухе. Однако электроносы, применяющиеся, например, в пищевой промышленности, имеют всего 50 сенсоров, то есть диапазон регистрируемых такими приборами запахов намного уже.
читать дальше... (Мембрана)
---------------------------------------------------------------------------------------------
7 ноября 2006
Робототехника. Медицинские технологии
Компания Panasonic показала силовой жакет для парализованных пациентов.
Опытный образец робототехнического жакета REALIVE для восстановления пациентов, у которых после удара оказалась
парализованной одна из рук, разработали две принадлежащие Matsushita
японские компании: Panasonic и
Activelink.
Главные элементы устройства — датчики и искусственные
пневматические мускулы из резины, которыми "управляет" компрессор,
закачивающий в них сжатый воздух.
Читать дальше... (Мембранa)
----------------------------------------------------------------------------------------------